EAS 557
Introduction to Seismology
Robert L. Nowack
Lecture 3A
Seismometry 1
(This lecture adapted from unpublished lecture notes by D.M. Boore and W. Thatcher)
Recording ground motions from earthquakes or controlled sources is basic to almost all of seismology. Not surprisingly, seismology didn’t begin to develop as a science until the late 1800’s with the invention of the first reliable seismograph.
First, let’s look at the frequency range of interest.
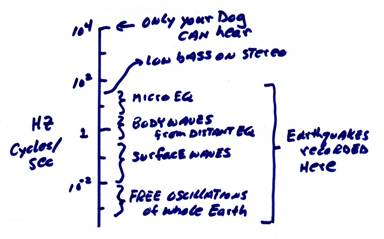
Besides this wide range of frequencies (five orders of magnitude for earthquakes), we also require a wide range of amplitudes.
The next
figure shows the range of seismic ground displacements for different size
earthquakes as a function of frequency and distance. For example, for teleseismic
earthquakes, for magnitudes between 4 and 8, at a distance of ![]() (~ 10,000 km,
where
(~ 10,000 km,
where ![]() ~ 111.19 km),
the range of ground motions at 1 Hz is from 10-9 m (1 nanometer) to
5 x 10-6 m (10-6 m = 1 micron, where 2-3 microns is the
size of a bacterium). At a lower
frequency of .01 Hz, the range of ground motions can be from 1 micron to
several cm’s for an earthquake of different magnitudes
at teleseismic distances. For a small microearthquake
of magnitude 2 at a distance of 30 km, the ground motions can be as small as 10-9
meters or 10 Angstroms.
~ 111.19 km),
the range of ground motions at 1 Hz is from 10-9 m (1 nanometer) to
5 x 10-6 m (10-6 m = 1 micron, where 2-3 microns is the
size of a bacterium). At a lower
frequency of .01 Hz, the range of ground motions can be from 1 micron to
several cm’s for an earthquake of different magnitudes
at teleseismic distances. For a small microearthquake
of magnitude 2 at a distance of 30 km, the ground motions can be as small as 10-9
meters or 10 Angstroms.
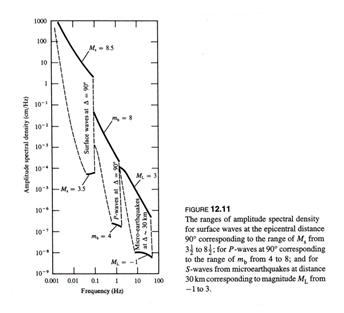
(from Aki and Richards, 1980)
No single instrument can record all these frequencies and amplitudes and even seismic recordings over a restricted frequency band-width are not completely faithful reproductions of the ground motion. Thus, any seismogram is a filtered version of the true motion, distorting it, but hopefully in a calculable way.
Although no longer in common usage, two types of mechanical seismometers illustrate the general principles without too much math.
1) The Mass and Spring System
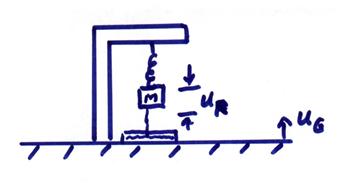
Here the ground moves through a displacement, uG. The mass, M, is displaced by a relative amount ur. Thus the total displacement of the mass, M, with respect to the fixed stars, say, is
![]()
Now, recall
![]() .
.
where the inertial force is
Ma. The restoring for the spring from
Hooke’s Law is ![]() , where K is the spring constant. If the system has some damping, there will be
a force due to damping of
, where K is the spring constant. If the system has some damping, there will be
a force due to damping of ![]() , where D is a damping constant. Then, from
, where D is a damping constant. Then, from
![]()
For ![]() and simplifying using
and simplifying using ![]() , then
, then
![]()
where ![]() and
and ![]() . This is a
linear constant coefficient differential equation and
. This is a
linear constant coefficient differential equation and ![]() is the forcing
function. Thus, the output motion of the
mass is related to the input ground acceleration through a differential
equation.
is the forcing
function. Thus, the output motion of the
mass is related to the input ground acceleration through a differential
equation.
2) The Damped Pendulum System
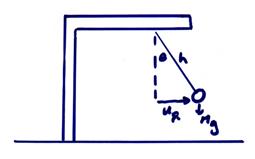
In this figure, ![]() . For small
deflections,
. For small
deflections, ![]() . The total
motion of the pendulum bob is then
. The total
motion of the pendulum bob is then
![]()
We can again use ![]() . The restoring
force of gravity is
. The restoring
force of gravity is ![]() , where g is
the acceleration of gravity, 9.81 m/s2. The damping force is
, where g is
the acceleration of gravity, 9.81 m/s2. The damping force is ![]() . Finally, there
is an additional reaction force at the support
. Finally, there
is an additional reaction force at the support ![]() . The force
balance can then be written as
. The force
balance can then be written as
![]()
or
![]() .
.
The reaction force at the support can be written as
![]()
where ![]() is the radius of
gyration. Then,
is the radius of
gyration. Then,
![]()
Let

Now, ![]() is called the
“reduced length” of the pendulum. For
the analysis here, we will just assume L ~ h. Then, we can write
is called the
“reduced length” of the pendulum. For
the analysis here, we will just assume L ~ h. Then, we can write
![]()
This is very similar to the equation of motion of the mass and spring system.
Suppose we
could amplify the pendulum deflection (using, for example, a light deflection
from a mirror on the mass) by an amount ![]() . Then, let
. Then, let
![]()
![]()
then,
![]()
This has the identical form as the mass and spring
seismometer system. It also includes a
static magnification ![]() .
.
The Solution for
Forced Response Systems
We will use
Fourier transforms where a time derivative in the Fourier domain is equivalent
to a multiplication by ![]() . Thus, we will write
. Thus, we will write ![]() , where
, where ![]() means in the
time or frequency domains. Also, a
second derivative,
means in the
time or frequency domains. Also, a
second derivative, ![]() , corresponds to
, corresponds to ![]() in the Fourier
domain. We will investigate the generic
forced response oscillator for both the mass and spring system and the small
amplitude pendulum system as
in the Fourier
domain. We will investigate the generic
forced response oscillator for both the mass and spring system and the small
amplitude pendulum system as
![]() (1)
(1)
I will first make several comments about the form of the solution to this differential equation.
For very rapid earth motion, the
first term on the left side dominates and the mass motion ![]() is proportional
to
is proportional
to ![]() (by dropping the
second two terms on the left side and integrating twice).
(by dropping the
second two terms on the left side and integrating twice).
For very slow earth motion, the
last term on the left side dominates and ![]() is proportional
to the ground acceleration.
is proportional
to the ground acceleration.
But the precise range depends on
the value of the spring constant and thus ![]() of the undamped system (
of the undamped system (![]() ).
).
To obtain the frequency response input ![]() , write
, write
and,
Then, substituting these into equation (1) and noting that
each derivative introduces a (![]() ), we get
), we get
![]()
where the integral in frequency is brought out of the equation to the left. Since this must hold for all frequencies, the term in parentheses must be zero for each frequency. Then,
Converting this to real and imaginary parts

or in terms of amplitude and phase
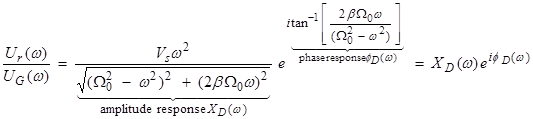
This gives the ratio of the oscillator response to the
ground displacement at a given forcing frequency ![]() .
.
Of course,
the actual ground motion is the sum or “Fourier integral” of the contributions
over a range of frequencies. Each
contribution is appropriately weighted by an amplitude factor and a phase
factor. Finally, the mass response in
the time domain can be obtained by inverse Fourier transforming ![]() to get
to get ![]() . But, useful
information can be obtained by looking just at the frequency response of the
oscillator.
. But, useful
information can be obtained by looking just at the frequency response of the
oscillator.
For ![]() and small
damping, then
and small
damping, then ![]() and
and ![]() . Then,
. Then, ![]() and the mass
motion is proportional to ground acceleration as noted above (recall
multiplication by
and the mass
motion is proportional to ground acceleration as noted above (recall
multiplication by ![]() in the frequency
domain corresponds to taking a second derivative in the time domain). For
in the frequency
domain corresponds to taking a second derivative in the time domain). For ![]() and small
damping, then
and small
damping, then ![]() and
and ![]() . For this case,
recall that mass motion is proportional to the ground displacement (the
frequency response is “flat”), but since
. For this case,
recall that mass motion is proportional to the ground displacement (the
frequency response is “flat”), but since ![]() is opposite in
sign. Thus, when the ground goes up
rapidly, the mass goes down. On a
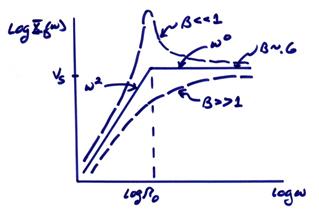
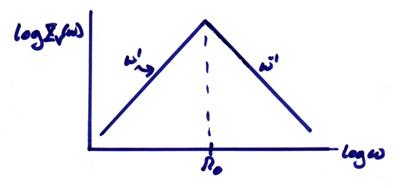
log-log plot, the amplitude response
is opposite in
sign. Thus, when the ground goes up
rapidly, the mass goes down. On a
log-log plot, the amplitude response ![]() is
is
The phase response ![]() is
is
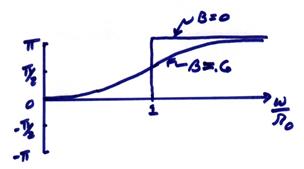
Note that ![]() is the resonant
frequency of the oscillator. The free
period is then
is the resonant
frequency of the oscillator. The free
period is then ![]() . The mechanical
oscillator is usually damped where
. The mechanical
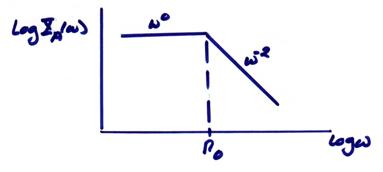
oscillator is usually damped where ![]() ~ 0.6 is a
commonly used damping since the amplitude response is simple, as shown above,
where the response is
~ 0.6 is a
commonly used damping since the amplitude response is simple, as shown above,
where the response is
~ flat in
displacement for ![]()
~ ![]() fall-off for
fall-off for ![]()
From the figure above, the other cases are
![]() << 1 – very little
damping. This is called Richter’s
“resonance catastrophy” since until about 1900
seismometers weren’t damped very much.
<< 1 – very little
damping. This is called Richter’s
“resonance catastrophy” since until about 1900
seismometers weren’t damped very much.
Can you guess what seismograms would look like?
![]() >> 1 – overdamped. This is not used much since it reduces the
overall response.
>> 1 – overdamped. This is not used much since it reduces the
overall response.
Now, let’s
assume we want our seismometer to act as a “velocity meter”, then for ![]() ~ 0.6
~ 0.6
For this case, the velocity response of the system is
![]()
Note that using a log-log plot, this simply changes the
slopes of the lines compared to the displacement response curve
![]() . Similarly, for
an “accelerometer”
. Similarly, for
an “accelerometer”
![]()
Note the simplicity of these response curves when we use log-log scales. Using relations,
then,
![]()
and
![]()
For these cases, log-log plots are very useful since powers
of frequency plot as straight lines.
Clearly the resonant frequency ![]() is the crucial
parameter of the instrument response.
is the crucial
parameter of the instrument response.
The free periods T0 for the two different types of mechanical oscillators are:
Spring and mass ![]()
where M is the mass and K is the spring constant.
Damped pendulum ![]()
where L is the “modified length” of the pendulum and g is the acceleration of gravity. Again, for the analysis here, we assume L ~ h. As an example, if we wanted T0 = 6 sec for a pendulum, which is a useful period for earthquakes, then L = 10 meters! Longer periods would be valuable to record too, but clearly this would get ridiculous fast.
Some early mass and spring seismometers used M ~ 20 tons to get longer free periods, but clearly K must increase too. Thus, there is a point of diminishing returns if we want the mass motion to be proportional to ground displacement.
For a
pendulum, one answer is to reduce the gravitational restoring force ![]() by slightly
inclining the pendulum on a rigid support, like a “garden gate”.
by slightly
inclining the pendulum on a rigid support, like a “garden gate”.

The restoring forces is then ![]() and effectively
replaces
and effectively
replaces ![]() in equation for
T0. (See
also the Lacoste seismometer in Aki and Richards, 1980, Figure 10.3 for a
vertical seismometer.)
in equation for
T0. (See
also the Lacoste seismometer in Aki and Richards, 1980, Figure 10.3 for a
vertical seismometer.)
Another
alternative is just to record ground acceleration in which case T0
can be small (and ![]() large). These types of mechanical instruments are
called accelerometers.
large). These types of mechanical instruments are
called accelerometers.
Most modern seismograph systems employ mechanical components that are similar to the above mass and spring and pendulum systems. However, they are not used alone because their strictly mechanical nature severely limits 1) the free period, and 2) the static magnification. What we really want is a seismometer deflection that is proportional to some electrical signal that we can amplify and filter in ways we desire using well developed electronic techniques.