EAS 557
Introduction to Seismology
Robert L. Nowack
Lecture 4
Vector and Cartesian Tensor Analysis
References:
Schey, H.M. (1997) Div, Grad, Curl and All That, Norton.
Mase, G.E. (1970) Theory and Problems of Continuum Mechanics, Schaum Outlines, McGraw Hill.
Matthews, P.C. (1998) Vector Calculus, Springer-Verlag.
A vector in Euclidean space is a directed line segment with a given magnitude and direction.
Certain physical quantities, such as force and velocity, which possess both magnitude and direction, may be represented in a three-dimensional space by directed line segments.
![]() a couple of equal
vectors
a couple of equal
vectors
Below, I will give the vector notation to the left and the index notation for a Cartesian vector to the right.
![]() ; xi
; xi
![]() ith
component of the vector
ith
component of the vector
Vectors add according to the parallelogram rule
![]() ;
; ![]() (components add)
(components add)
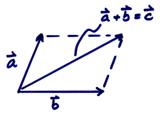
Put them head to tail to get the resulting vector addition.

Multiplication by a scalar ![]() ,
, ![]() ;
; ![]()
Unit vectors with a unit length can be written  , where
, where ![]()
A vector is usually represented by a column. For example, here are the components of a vector in R3

There are several ways to multiply vectors.
1) The dot product between two vectors results in a scalar.

or in index notation
![]()
In index notation, repeated indices are dummy indices which imply
![]()
This
is the so called Einstein sum convection.
Note that ![]() .
.
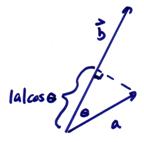
The geometric interpretation of the dot product is that it “projects” one of the vectors onto the other and multiples the resulting two lengths. Thus,
![]()
Ex)
Let ![]() with
with
![]()
then,
![]()
Thus,
![]()
![]()
Note that for two
vectors to be perpendicular to each other, then ![]() and
and ![]() .
.
2) The cross vector product between two vectors results in another vector, where
![]()
where ![]() is the measure area of
parallelogram made from the two vectors
is the measure area of
parallelogram made from the two vectors ![]() and
and ![]() .
.
Use the right-hand rule to find orientation of ![]() .
.
This is an oriented vector depending on
the order of the two vectors and follows a “right hand rule”. Thus, ![]() . A quick and dirty
formula for the cross product can be obtained from the determinant as,
. A quick and dirty
formula for the cross product can be obtained from the determinant as,
 where
where ![]()
![]()
To express this in index notation, we must introduce the alternating symbol
then
![]()
where this has repeated indices on j and k and has an implied sum on them. Thus,
For example, for the c1 component,
![]()
This is the same result as from the other formula. One of the reasons that a cross product has a complicated index notation form is that one is really trying to represent an area by a vector normal to it. This can be done in 3-D, but not in higher dimensions where the cross product cannot be represented as a vector, but rather the area itself must be used. This more general analysis is called the exterior calculus of differential forms.
3) The outer product results in a matrix type quantity of second order

In index notation, this is very simply written as
where i is the row index and j is the column index.
The
volume of a parallel piped in 3-D is given by the scalar ![]() or
or
![]()
where ai, bj, and ck are summed on i, j, and k. This results in
Thus, this determinant measures a volume.
A dyad is a second order tensor with two indices. A vector is a first order tensor and a scalar is a zero order tensor.
An identity matrix in R3 can be written as

This is often written as I or in index notation
![]()
and is called the Kronecker delta. A useful identity between the Kronecker delta and the alternating symbol is
![]()
A dyad can always be decomposed into its symmetric and an anti-symmetric part
where DT is the transpose of D.
A linear transformation between two vectors can be represented by a dyad. Then,

In index notation, this is written
![]()
where there is an implied sum on j, or
Coordinate Systems
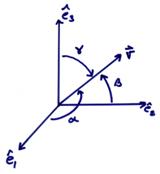
In
space, any vector can be represented as projections onto three non-zero, non-coplanar
vectors. Let these be ![]() . These give a unique
representation of any vector
. These give a unique
representation of any vector ![]() in 3-D. Then,
in 3-D. Then,
![]()
Most frequently, we will choose
the rectangular Cartesian system (![]() ) where
) where  ,
,  , and
, and  .
.
![]()
This forms an orthonormal set of basis vectors.
Now,
the components of ![]() with respect to (
with respect to (![]() ) are
) are
In
addition to rectangular Cartesian coordinates, we could (and will) use
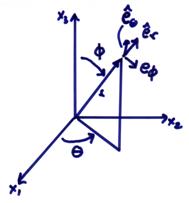
cylindrical systems (![]() ), spherical systems (
), spherical systems (![]() ).
).
For cylindrical coordinate systems

For spherical coordinate systems

Cylindrical coordinates Spherical coordinates
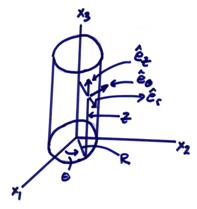
These systems provide unique representations, but, in general, do not have fixed directions in space and are functions of position.
Coordinate Transforms
The coordinate transformation from a vector from one coordinate system to another is given by the coordinate transformation equations
![]()
where ![]() are the coordinates of
the vector in the xi
system and
are the coordinates of
the vector in the xi
system and ![]() are the coordinates of
the vector in the second system.
are the coordinates of
the vector in the second system.
For
small changes of the coordinates, use a
(with an implied sum on j). This is an invertable transformation if ![]() is nonsingular.
is nonsingular.
Tensors will transform by
![]()
![]() vector transformation
vector transformation
where ![]() are the components in
coordinate system 2 and
are the components in
coordinate system 2 and ![]() are the components in
coordinate system 1. Second order
tensors transform as
are the components in
coordinate system 1. Second order
tensors transform as
![]()
(implied sum on r and s).
In Cartesian coordinates, vectors transform from one rotated coordinate system to another as
![]()
(with implied sum on j) where ![]() are the direction
cosines between
are the direction
cosines between ![]() and
and ![]() in the two coordinate
systems. Thus,
in the two coordinate
systems. Thus,
![]()
where rotation matrices A = aij are orthonormal. Thus, ![]() and
and ![]() .
.
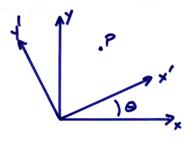
For example, for the point P, the coordinates in two rotated coordinate systems are related by
![]()
Second order Cartesian tensors transform like
![]()
(with implied sums on p and q). This in matrix notation is
![]()
General transforms are done using the Jacobian of the coordinate transformation equations and the introduction of a given metric. The components or “scale factors” (h1,h2,h3) of the metric tensor come into the index description of the vector operations. (h1,h2,h3) are the square root of the diagonals of the metric tensor. For example, for
Cartesian – h1 = 1, h2 = 1, h3 = 1
spherical
– hr = 1, ![]() = r,
= r, ![]() =
= ![]()
cylindrical
– hr = 1, ![]() = r, hz = 1
= r, hz = 1
Vector and tensor fields assign a vector (or tensor) to every point in space (and time). Thus,
scalar
field – ![]()
vector
field – ![]()
tensor
field – ![]()
Coordinate differentiation with
respect to xi is expressed
by ![]() .
.
This
is given a special symbol, ![]() the “
the “
Comma notation is sometimes used
![]()
Several important vector
operations with
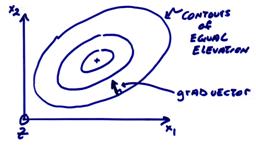
1) The
 ;
; ![]() (index notation)
(index notation)
For example, on a surface ![]() is the vector at
is the vector at ![]() that points in the
direction of maximum ascent.
that points in the
direction of maximum ascent.
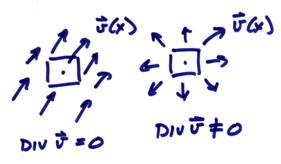
2) The
In index notation, this can be written
as ![]() or
or ![]() (sum on i).
This measures the net flux into or out of the local region at a given
point.
(sum on i).
This measures the net flux into or out of the local region at a given
point.
3) The
 ;
; ![]()
(index notation, sum on j and k) where ![]() is the alternating
symbol. The curl measures the local
vorticity or rotation (as in a bathtub drain) at a given point.
is the alternating
symbol. The curl measures the local
vorticity or rotation (as in a bathtub drain) at a given point.

local paddle wheel
The curl points the direction of the rod for clockwise rotation.
4) The Laplacian is a second order operation
![]() ;
; ![]() (index notation, sum
on i)
(index notation, sum
on i)
(sum on i).
5) Several identities of interest are
![]() ;
; ![]() (sum on j and k)
(sum on j and k)
![]() ;
; ![]() (sum on i,
j and k)
(sum on i,
j and k)
An essential integral identity is
Gauss’ Theorem. This relates a volume
integral to a boundary surface integral for a vector (tensor) field ![]() , where
, where ![]() is the outward unit
normal of the surface. Thus,
is the outward unit
normal of the surface. Thus,
![]() ;
; ![]() (sum on i)
(sum on i)
or for a second order tensor
![]()
Finally, we give the gradient,
divergence, and curl in orthogonal curvilinear coordinates (![]() )
)
![]()


where the h1, h2, h3 are given for cartesion, cylindrical, and spherical coordinates above.