
Hexrotor UAVs
Quadrotor UAVs have become very popular for research and recreation because they are relatively easy to fly. This project investigates concepts in fully-actuated multi-rotor UAVs and the benefits they provide for many useful applications.
ReFrESH
ReFrESH
RecoNode (Purdue University)
The RecoNode is a high-performance wireless sensing and control node for Heterogeneous Wireless Control Networks.Dexterous Hexrotor
The Dexterous Hexrotor is new type of fully-actuated multi-rotor suitable for aerial manipulation and search-and-rescue tasks.
The Dexterous Hexrotor is intended to be a manipulative node in a heterogeneous fabric for ubiquitous computing. Nodes in this computational fabric will contain many of the capabilities needed for a robot: computation, wireless communication, sensing, and manipulation. A novel aspect of these nodes is their capability for run-time reconfiguration (RTR) through both software and hardware. Hardware RTR is being implemented with a Field Programmable Gate Array (FPGA).
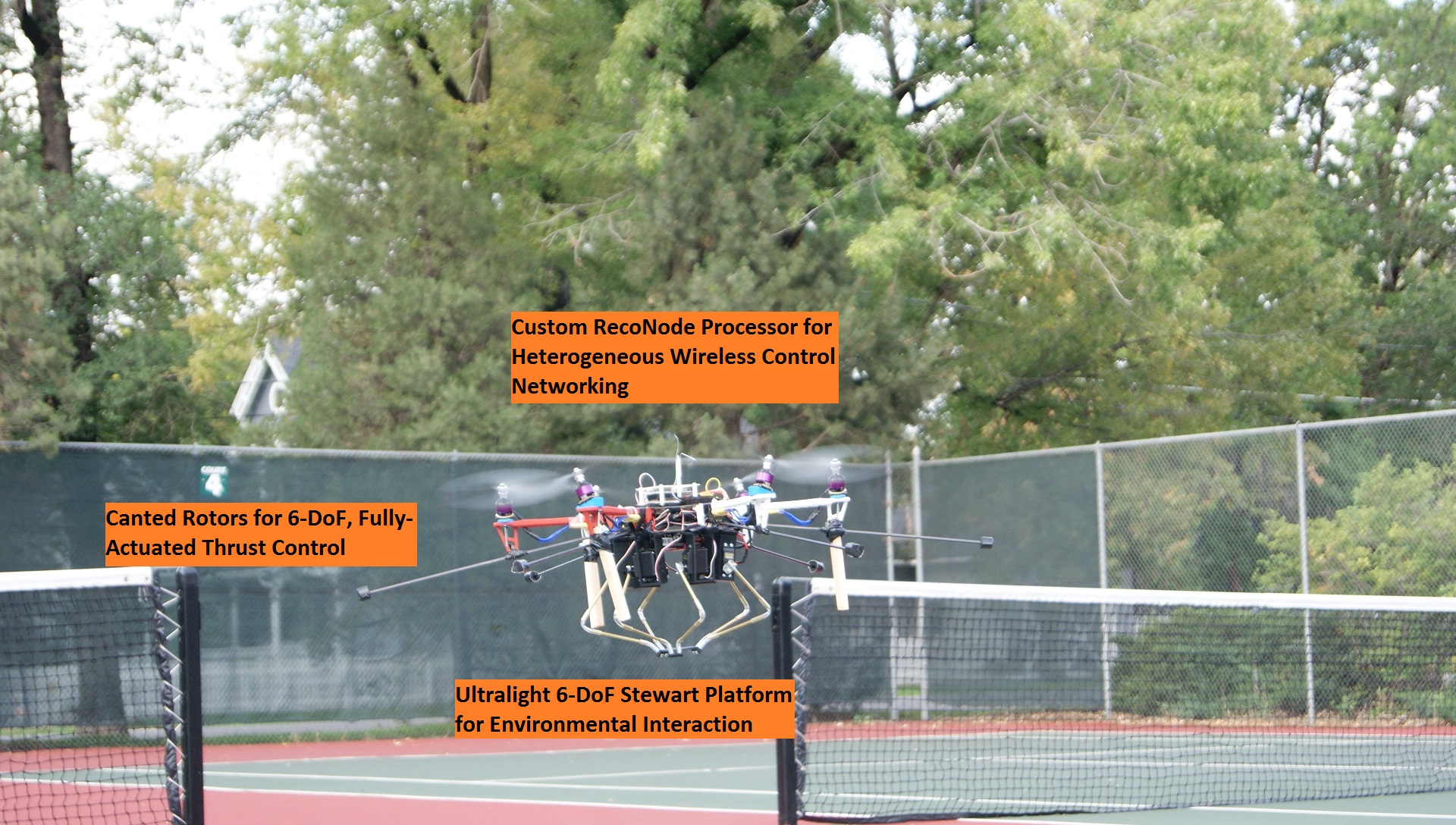 |
| Dexterous Hexrotor with ultralight HexManipulator hovering. |
As part of a project sponsored by the NSF Center for Robots and Sensors for the Human Well-Being (RoSe-HUB), the Dexterous Hexrotor is shown here performing a building inspection. .
 |
| Dexterous Hexrotor inspecting a building up close.. |
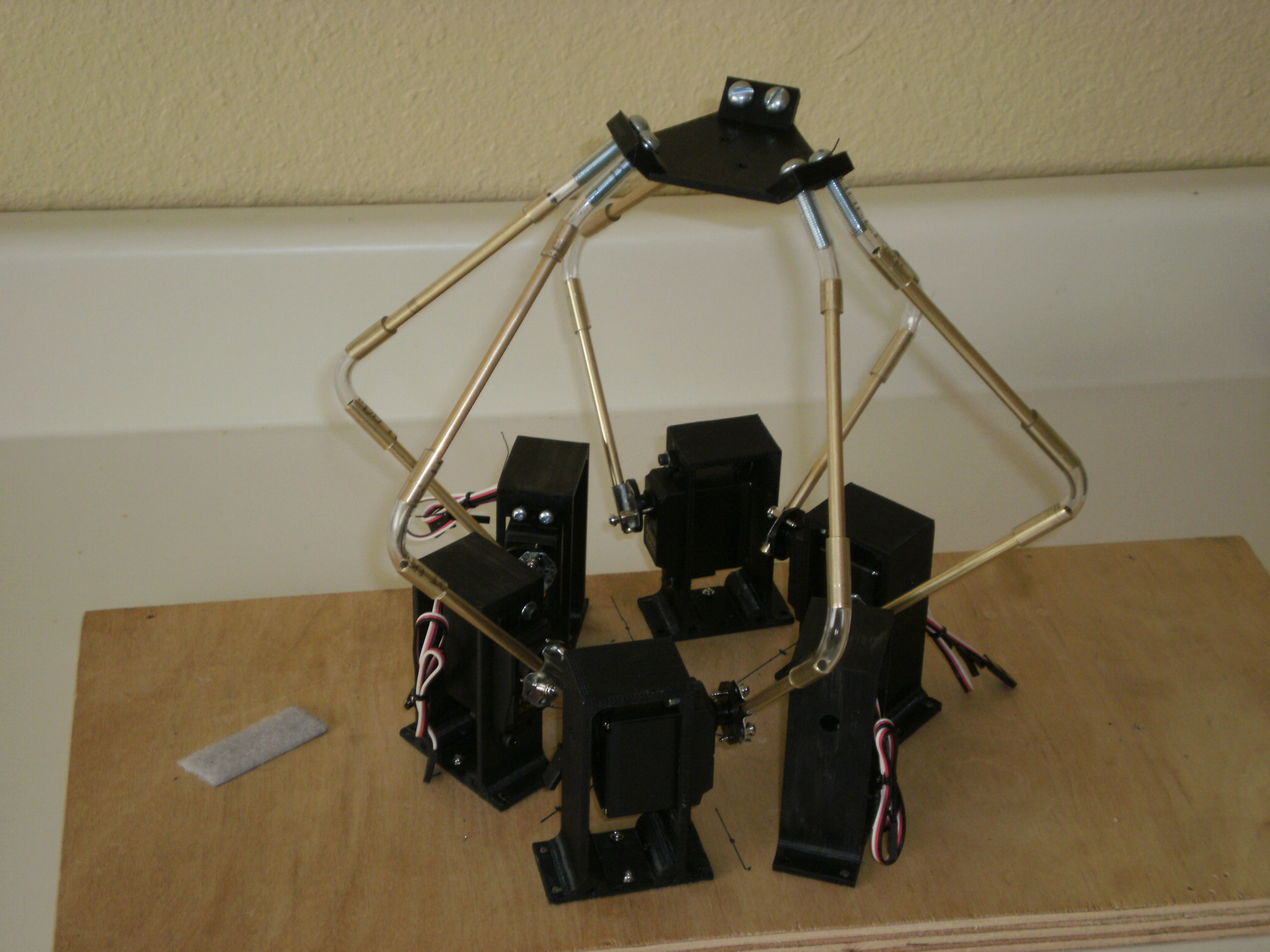 |
| HexManipulator |
Publications
- G Jiang, RM Voyles, JJ Choi, "Precision Fully-Actuated UAV for Visual and Physical Inspection of Structures for Nuclear Decommissioning and Search and Rescue," in Proc. of the IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2018.
- G Jiang, R Voyles, K Sebesta, H Greiner, "Estimation and optimization of fully-actuated multirotor platform with nonparallel actuation mechanism," in IEEE/RSJ Intl Conf on Intelligent Robots and Systems (IROS), 2017.
- Jiang, G., Voyles, R. Cappelleri, D., McArthur, D., Mou, S., Yertay, A. Bean, R. Abbaraju, P., Chowdhury, A., "Purpose-Built UAVs for Physical Sampling of Trace Contamination at the Portsmouth Gaseous Diffusion Plant," in Waste Management (WM 2017), 43rd International Symposium on, Phoenix, AZ, Mar., 2017.
- Y. Cui, R.M. Voyles, R.A. Nawrocki, and G. Jiang, " Morphing Bus: A New Paradigm in Peripheral Interconnect Bus," in IEEE Transactions on Components, Packaging and Manufacturing Technology, v. 4, n. 2, 2014, pp. 341-351.
- Y Cui, J Lane, R Voyles, A Krishnamoorthy, "A new fault tolerance method for field robotics through a self-adaptation architecture," in Proc of IEEE International Symposium on Safety, Security, and Rescue Robotics, 2014.
- G Jiang, R Voyles, K Sebesta, H Greiner, "Mock-up of the exhaust shaft inspection by dexterous hexrotor at the DOE WIPP site," in Proc. of the IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2015.
- Y Cui, JT Lane, RM Voyles, "Real-time software module design framework for building self-adaptive robotic systems," in IEEE/RSJ Intl Conf on Intelligent Robots and Systems (IROS), 2015.
- Y Cui, J Lane, R Voyles, A Krishnamoorthy, "A new fault tolerance method for field robotics through a self-adaptation architecture," in Proc of IEEE International Symposium on Safety, Security, and Rescue Robotics, 2014.
- G Jiang, R Voyles, "A nonparallel hexrotor UAV with faster response to disturbances for precision position keeping," in IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2014.
- Y Cui, RM Voyles, MH Mahoor, "Refresh: A self-adaptive architecture for autonomous embedded systems," in 2013 IEEE Intl Conf on Automation Science and Engineering (CASE), pp. 850-855, 2013.
- G Jiang, R Voyles, "Hexrotor UAV platform enabling dextrous interaction with structures - Preliminary work," in IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2012.
Robotics Sources
Distributed Robotics Source List
Support
This project has been funded by the National Science Foundation under grant 1450342 and by the NSF RoSe-HUB Center under grant 1439717 with additional support from the U.S. Dept. of Energy.
Copyright: © 2000,2003,2005,2013,2017-2019 by Richard M. Voyles
rvoyles [at] purdue [dot] edu