
Wireless Sensor/Actuator/Control Networks
Prof. Voyles is Site Director of the NSF
Safety, Security and Rescue Research Center at DU. The SSR-RC is an NSF I/UCRC (Industry/University
Cooperative Research Center) that has been formed in cooperation with
UMN.
The SSR-RC is sponsoring some of this work. This site also reflects work as a participant in the National Science
Foundation grant CNS-0923518.
This Page is Under Development
In collaboration with the University of Pennsylvania, Notre Dame, and the University of Texas at Arlington, we are developing a heterogeneous network of nodes at the micro, meso and macro scales for distributed, wireless and wired real-time control for multi-robot distributed teams, manufacturing plant automation, vehicular networks, and smart grids.
One of the target platforms to benefit from this type of heterogeneous, distributed control is the CRAWLER (a.k.a. TerminatorBot), a small, resource-constrained, search-and-rescue robot. At the macro scale, our RecoNode -- a high-performance (800 MIPS), dynamically reconfigurable, wireless, distributable node -- is being used as the backbone of high-performance wireless sensor networks research, wireless video sensor networks research, heterogeneous sensor networks, and static and dynamic reconfigurable computing research.
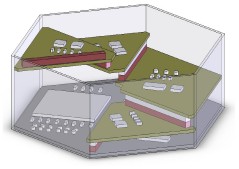
|
| CAD model of the RecoNode with its Morphing Bus I/O bus. |
Autonomic Computing is a term derived from the biological description of our Autonomic Nervous System. The autonomic nervous system is that part of the nervous system that maintains homeostasis, or the internal status of the system (human body, in this case). Temperature, hydration level, blood pressure, etc. are elements of the internal status of the human body. These are self-regulating in the face of varying environmental conditions.
Likewise, we are interested in self-regulation of robots through self-reconfiguration of hardware and software -- an autonomic system. One example of our autonomic robots is a robot that can identify terrain based on gait effects, and then modify the gait to maintain some level of locomotion efficiency. (See Larson, Demir, and Voyles, 2005, below.)
TerminatorBot
The TerminatorBot is a search-and-rescue robot that is unique in its ability to manipulate objects and crawl over very difficult terrain in such a small package. Inspired by the final scene of the original Terminator movie, this sode can-size robot is able to manipulate objects with its limbs and locomote by dragging itself with the same limbs. Below are pictures of the first two 75mm-diameter prototypes of the TerminatorBot. A third has actuated claws for climbing down ropes. (Climbing action has yet to be perfected. Stay tuned for videos future...)
The TerminatorBot is intended to be a manipulative node in a heterogeneous fabric for ubiquitous computing based on the reconfigurable computing node described here. Nodes in this computational fabric will contain many of the capabilities needed for a robot: computation, wireless communication, sensing, and manipulation.
 |
|
Two TerminatorBots collaboratively navigating on rock and wood chips. As part of a workshop sponsored by the NSF R4 program and the NSF Safety, Security, and Rescue Research Center, the TerminatorBot is shown here at the rubble pile at the Lakehurst Naval Air Station with New Jersey Task Force 1. |

|
| TerminatorBot after a drop into a vertical sewer pipe. |
Publications
- B.H. Kim, C. D'Souza, R.M. Voyles, J. Hersch, S. Roumeliotis, "A Reconfigurable Computing Platform for Plume Tracking with Mobile Sensor Networks," in the Proceedings of the 2006 SPIE Defense and Security Symposium, Orlando, FL, April, 2006.
- A.C. Larson, G.K. Demir, and R.M. Voyles, "Terrain Classification Using Weakly-Structured Vehicle/Terrain Interaction ," in Autonomous Robots, v. 19, pp. 41-52, 2005.
- W. Zhao, B.H. Kim, A.C. Larson and R.M. Voyles, " FPGA Implementation of Closed-Loop Control System for Small-Scale Robot," in Proceedings of the 2005 International Conference on Advanced Robotics, v. 1, pp. .
- A. Larson and R. Voyles, "TerminatorBot: A Novel Robot with Dual-Use Mechanism for Locomotion and Manipulation," in IEEE/ASME Transactions on Mechatronics, v. 10, n. 1, pp. 17-25, 2005.
- R.M. Voyles, A.C. Larson, M. Lapoint and J. Bae, " Core-Bored Search-and-Rescue Applications for an Agile Limbed Robot," in Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, v. 1, pp. 58-63.
- R.M. Voyles, "A Mesoscale Mechanism for Adaptive Mobile Manipulation," in Proceedings of the ASME Dynamic Systems and Control Division, ASME Annual Meeting, v. 2, pp. 957-964.
- R.M. Voyles, "TerminatorBot: A Robot with Dual-Use Arms for Manipulation and Locomotion," in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 1, pp. 61-66.
- K. Yesin, B. Nelson, N. Papanikolopoulos, R. Voyles and D. Krantz, "Active Video System for a Miniature Reconnaissance Robot" in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 4, pp. 3920-3925.
Robotics Sources
Distributed Robotics Source List
Copyright: © 2007 by Richard M. Voyles
rvoyles [at] purdue [dot] edu