
Tactile Sensing/Actuation and Haptic Interface Research
Multi-Modal "Tactile Perception On-the-Fly"
Despite being highly error-prone, moody, and imprecise, humans are very difficult to replace in real-world environments, such as assistance in the home and even in highly structured environments, such as manufacturing. Humans are exceptionally adaptable and have an inate understanding of the world that we refer to as "common sense." Unlike robots, humans have very good anomaly detection and can reason about possible future outcomes.
For example, take a simple manufacturing line in which parts come down the line and arrive at a pick-up station. Often, the pick-up station has a microswitch or light beam sensor that detects part presence/absence
Modular Tactile Sensor/Actuator System
There are two general classes of contact sensors: intrinsic and extrinsic. Intrinsic tactile sensing uses pure force and torque measurements plus geometric calculations to deduce contact conditions at the finger/object interface. The output of an intrinsic tactile sensor is a resolved force/torque vector. Extrinsic tactile sensing uses arrays of 1-dimensional pressure sensors distributed over the sensor surface to extract a tactile image of the finger/object interface.
The modular sensor/actuator system we are developing is based on three interchangeable components: an extrinsic sensor array, an intrinsic force/torque sensor, and a conformal tactor array. The tactor array is for end-of-human use only, either in conjunction with the extrinsic sensor array for gesturing or in conjunction with an external force reflecting device for virtual reality (VR) applications. The intrinsic sensor is for end-of-robot use only and is used in conjunction with the extrinsic array or a variety of passive tips during autonomous manipulation or telemanipulation. The extrinsic sensor can be used either on the robot or on the human, both with and without underlying components for intrinsic sensing.
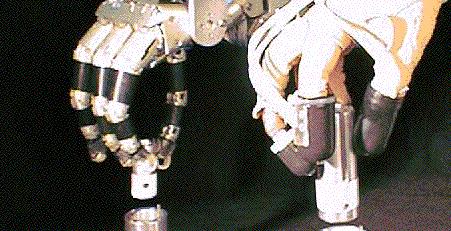
For sensing human contact gestures, the extrinsic sensor array and the tactor array are similar to a pair of thimbles. The wearable tactor will be somewhat smaller than the wearable extrinsic sensor so it can nest inside the sensor. Clearance will be provided so an instrumented glove can be captured between the "thimbles" for finger joint sensing.
The design of the two components will be very similar in that the tactor is an "inside-out" version of the sensor. Both use an electrorheological gel to provide "fleshy" properties. The sensor will use it primarily as a dielectric for capacitive sensing and as a structural material. The tactor will use it primarily for its electrorheological or magnetorheological properties. For sensing robotic contact during manipulation, the extrinsic and intrinsic sensors will be nested to provide both contact force distribution and net force/torque. We are taking two design approaches to structure of the intrinsic sensor: single cylindrical cantilever beam or a stewart-platform-inspired arrangement.
Tactile Sensors
 |
| Wearable Extrinsic and Intrinsic Fingertip Force Sensors |
 |  |
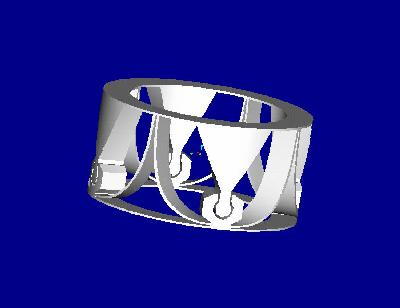
| Core of ER Fingertip for a Robotic Hand | Cutaway Drawing of Electrorheological Extrinsic Fingertip Sensor |
 |
| Nestable Extrinsic and Intrinsic Robotic Fingertip Force Sensors |
 |  |
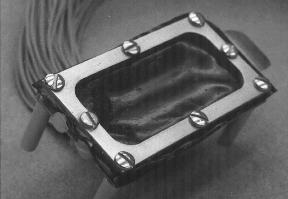
| Prototype of Human-Wearable Intrinsic Force Sensor | Design of Human-Wearable Intrinsic Force Sensor with six degrees of freedom. |
Tactile Actuators
 |
Haptic Links
- Immersion Immersion acquired Virtual Technologies to expand its line of 3D sensing technology
- Pressure Profile Systems Spun off from Jae Son's Ph.D. work
Copyright: © 1999-2003,2019 by Richard Voyles
rvoyles [at] purdue [dot] edu