

Prof. Richard Voyles, along with his students and various collaborators, has developed a number of robotic devices for various aspects of search and rescue and emergency response. Particular areas of study include confined search under the rubble (CRAWLER, Water Hammer Actuator, Crabinator), novel locomotion over the rubble in USAR (MOTHERSHIP, Wolverine), UAVs for up-close inspection of damaged structures in wide area disasters (Dexterous Hexrotor), and UAVs for physical swabbing of contamination in nuclear decontamination and decommissioning (Dexterous Hexrotor). Many of these investigations have been in cooperation with the NSF Center for Robots and Sensors for the Human Well-Being (RoSeHUB), an NSF Industry/University Cooperative Research Center.
MOTHERSHIP
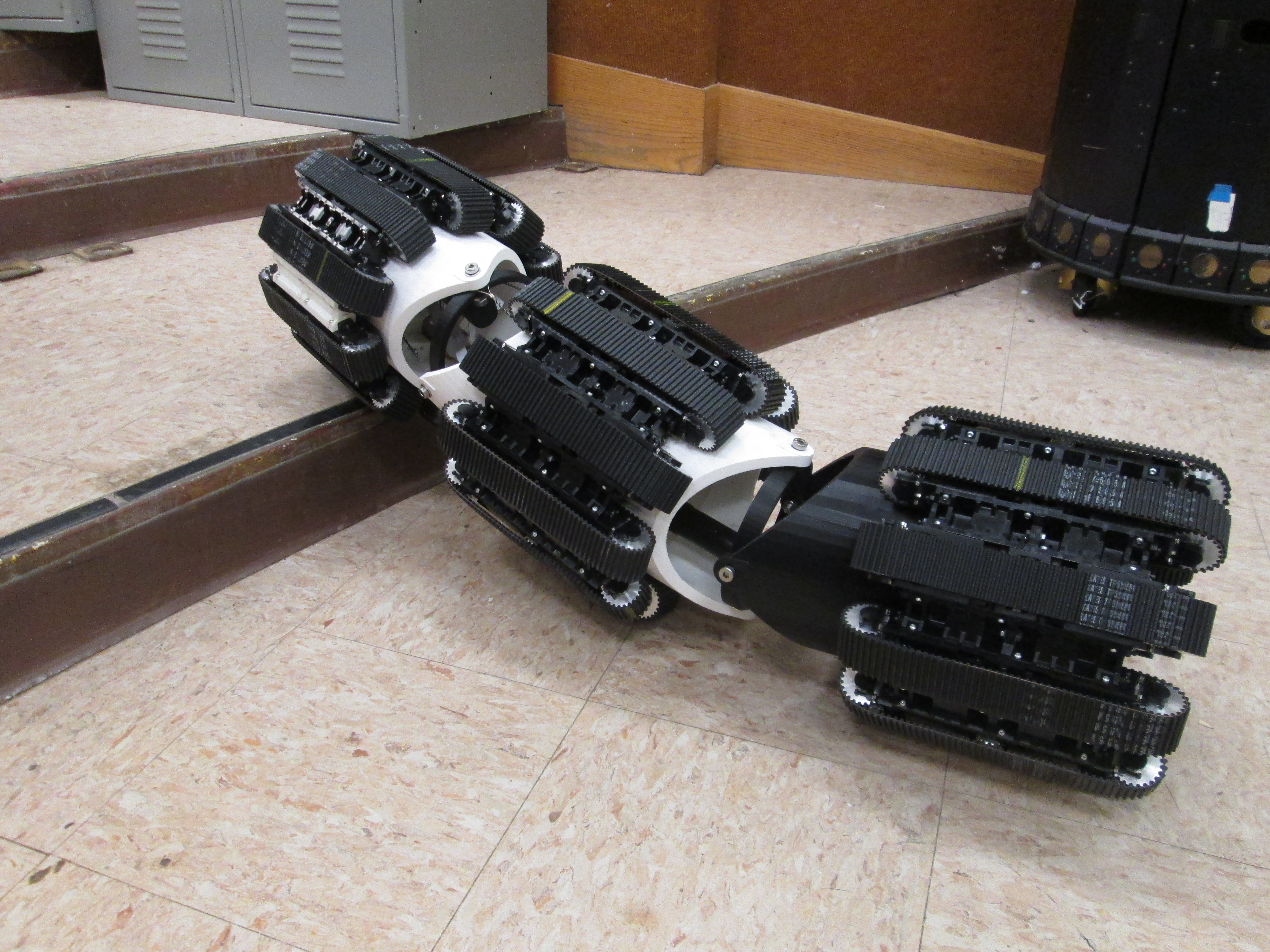
The MOTHERSHIP represents a new class of hybrid ground robot that combines treads, limbs, and serpentine locomotion.MOTHERSHIP - Modular Omnidirectional Terrain Handler for Emergency Response, Serpentine and Holonomic for Instantaneous Propulsion - combines 2-dimensional treads with articulated joints to create a new class of serpentine locomotor that minimizes "high centering" and can climb stairs, rubble, and cross chasms. We developed the concept of 0-degree, 1-degree and 2-degree high centering to characterize the locomotion modes and benefits.
This novel robot was developed as part of an instrument developed under NSF MRI 1450342 and is used by projects in the NSF Center for Robots and Sensors for the Human Well Being (RoSeHUB) NSF 1439717.
|
| Hybrid MOTHERSHIP robot on stairs in the Collaborative Robotics Lab |
|
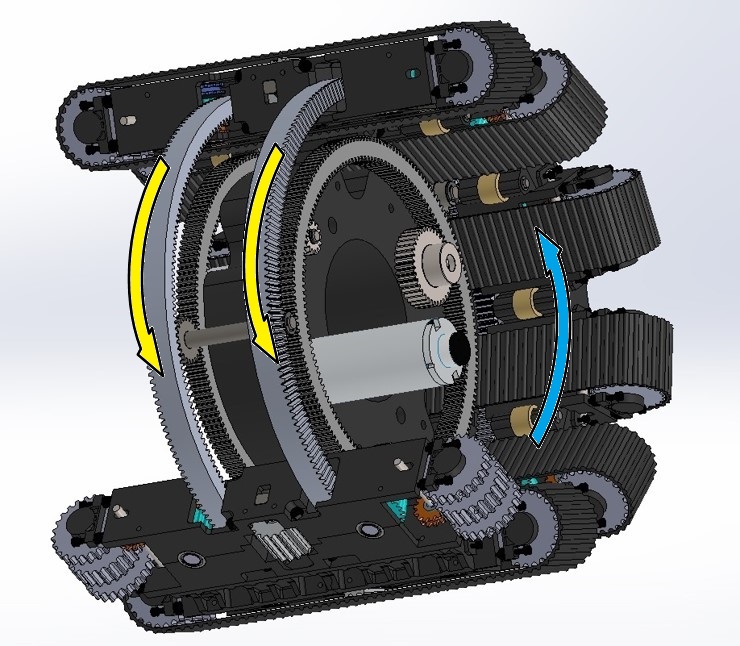
| MOTHERSHIP tread module differential drive - same direction orbits the treads in the transverse mode |
|
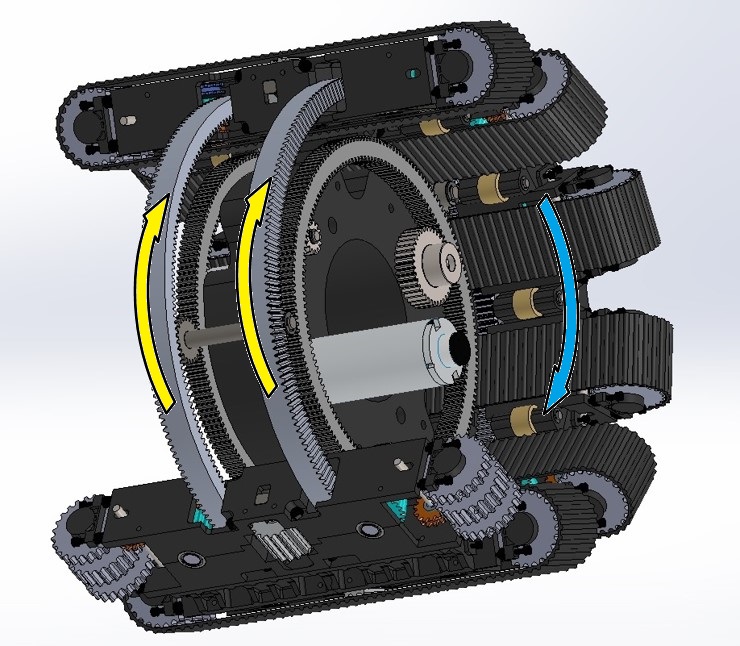
| MOTHERSHIP tread module differential drive - opposite directions drives the treads in the longitudinal mode |
CRAWLER (a.k.a. TerminatorBot)
CRAWLER - Locomotion and Manipulation from a Single Mechanism
The TerminatorBot is a small, crawling, search-and-rescue robot. Also known as CRAWLER (Cylindrical Robot for Autonomous Walking and Lifting during Emergency Response), it is distinct from most other small robots in its ability to manipulate objects and crawl over difficult terrain. Inspired by the final scene of the original Terminator movie, this millibot is able to manipulate objects with its arms and locomote by dragging itself with the same arms. Below are pictures of the first two 75mm-diameter prototypes of the TerminatorBot. A third has actuated claws for climbing down ropes.
 |
| Two TerminatorBots collaboratively navigating on rock and wood chips. |
The TerminatorBot is intended to be a manipulative node in a heterogeneous fabric for ubiquitous computing. Nodes in this computational fabric will contain many of the capabilities needed for a robot: computation, wireless communication, sensing, and manipulation.
CRAWLER took its first trip to Disaster City in April, 2010 as part of an NSF-sponsored workshop organized by Dr. Robin Murphy. Although the NIST test standards are currently aimed at a larger class of robot, it crawled an inclined roof at the "House of Pancakes" and crawled under a low concrete slab (approx. 15 cm headroom).
CRAWLER at Disaster City (video)
Dual-Use Robots for Emergency Response and Handling of High-Consequence Materials
A common problem with emergency response robots is their relatively sparse use makes them difficult to use in low-likelihood scenarios. On a complex piece of equipment, most repsonders are given about 40 hours of initial trianing and then about 8 hours of annual refresher. For a commplex device that might not be used even once per year, thsi may not be sufficient for striong familiarity and ease of use. Responders may shy away from unfamiliar equipment under high-stress situations. So, a solution is dual-use of emergency response robots for more common tasks such as routine maintenance or inspection.
The Collaborative Robotics Lab teamed with Howie Choset's Biorobotics Lab at Carnegie Mellon to demonstrate modular robots at the DOE Science of Safety challenge. The Science of Safety Challenge resulted from a joint DOE/NAF sponsored workshop on the Robotic Handling of High-Consequence Materials (NSF 1550326-OISE)

Water Hammer Actuation
The Water Hammer Actuator is a novel "bulk-motive force" actuator developed as an active tether for CRAWLER. Originally proposed by Perrin, Howe and others at Harvard University, this NSF-sponsored project examines the modeling of the detailed fluid/hose interaction to extract relevant parameters for the engineering and construction of active tethers for urban search and rescue.
This work is sponsored both by a direct grant from NSF and by the NSF Center for Robots and Sensors for the Human Well-Being (RoSeHUB), an NSF Industry/University Cooperative Research Center.
CRAWLER Marsupial Deployment
 |
| TerminatorBot deployed by Wolverine with active cable hoist. |
As part of a workshop sponsored by the NSF R4 program and the NSF Safety, Security, and Rescue Research Center, the TerminatorBot is shown here at the rubble pile at the Lakehurst Naval Air Station with New Jersey Task Force 1.
 |
| Gen 2 prototype TerminatorBot after a drop into a vertical sewer pipe. |

|
| Gen 1 prototype TerminatorBot in mock Search-and-Rescue operation. (Robot was manually controlled to perform this.) |
 |
| Gen 1 prototype of TerminatorBot stowed for ballistic deployment. |
| 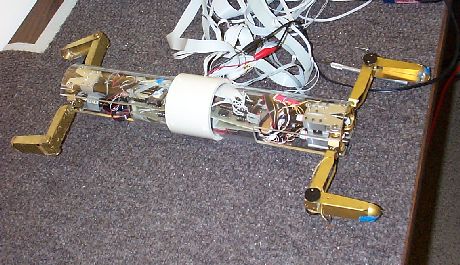
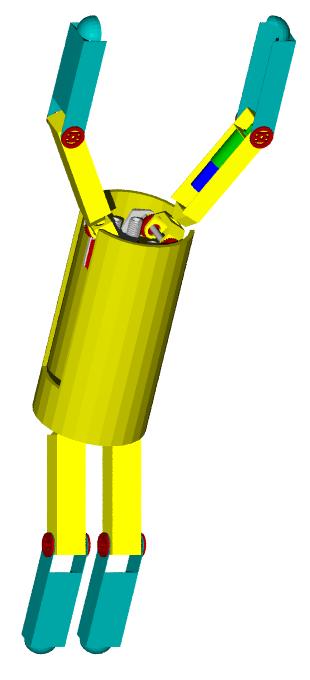
Two TerminatorBots reconfigured as a 4-legged walker. These two were manually attached, but future work will examine self-reconfiguring TerminatorBot modules for 2- 4- and 6-legged locomotion. There are two long-term goals regarding TerminatorBot's size. One is to shrink it to about half-size (40 mm in diameter) to make it compatible with the M203 grenade launcher and the existing Scouts. The other goal is to increase its size about four times to achieve a better power-to-weight ratio. The plan is then to examine the transitions from crawling to bipedal walking, as shown below, using pairs of "legs" customized for specific functions. Two modular TerminatorBot mechanisms (actuated end effectors not shown) assembled into a roughly half-meter high invertible biped walker/swimmer for multiple forms of locomotion. The RecoNode project arose to develop a miniature, modular, single-board computer to serve as the brain of TerminatorBot and other massively networked research projects for rapid prototyiping of complex control systems. |
Publications
- G Jiang, RM Voyles, JJ Choi, "Precision Fully-Actuated UAV for Visual and Physical Inspection of Structures for Nuclear Decommissioning and Search and Rescue," in Proc. of the IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2018.
- G Jiang, R Voyles, K Sebesta, H Greiner, "Estimation and optimization of fully-actuated multirotor platform with nonparallel actuation mechanism," in IEEE/RSJ Intl Conf on Intelligent Robots and Systems (IROS), 2017.
- Jiang, G., Voyles, R. Cappelleri, D., McArthur, D., Mou, S., Yertay, A. Bean, R. Abbaraju, P., Chowdhury, A., "Purpose-Built UAVs for Physical Sampling of Trace Contamination at the Portsmouth Gaseous Diffusion Plant," in Waste Management (WM 2017), 43rd International Symposium on, Phoenix, AZ, Mar., 2017.
- M Ayad, R Voyles, J Bae, "Locally selectable protocol for sparse, highly-volatile, robotic wireless video sensor networks," in International Journal of Sensor Networks 20 (2), 70-83, 2016
- Y Cui, J Lane, R Voyles, A Krishnamoorthy, "A new fault tolerance method for field robotics through a self-adaptation architecture," in Proc of IEEE International Symposium on Safety, Security, and Rescue Robotics, 2014.
- G Jiang, R Voyles, K Sebesta, H Greiner, "Mock-up of the exhaust shaft inspection by dexterous hexrotor at the DOE WIPP site," in Proc. of the IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2015.
- Y Cui, JT Lane, RM Voyles, "Real-time software module design framework for building self-adaptive robotic systems," in IEEE/RSJ Intl Conf on Intelligent Robots and Systems (IROS), 2015.
- Y Cui, J Lane, R Voyles, A Krishnamoorthy, "A new fault tolerance method for field robotics through a self-adaptation architecture," in Proc of IEEE International Symposium on Safety, Security, and Rescue Robotics, 2014.
- G Jiang, R Voyles, "A nonparallel hexrotor UAV with faster response to disturbances for precision position keeping," in IEEE Intl Symp on Safety, Security, and Rescue Robotics, 2014.
- R.A. Nawrocki, X. Yang, S.E. Shaheen and R.M. Voyles, "Structured Computational Polymers for a soft robot: Actuation and cognition," in Proc. of the 2011 IEEE Intl. Conf. on Robotics and Automation, v. 1, pp. 5115-5122.
- R.A. Nawrocki, S. Shaheen, X. Yang, and R.M. Voyles, "Towards an All-Polymer Robot for Search and Rescue," in IEEE Workshop on Safety, Security and Rescue Robots, Denver, CO, Nov., 2009.
- X. Yang, R.M. Voyles, K. Li and S. Povilus, "Experimental Comparison of Robotics Locomotion with Passive Tether and Active Tether," in IEEE Workshop on Safety, Security and Rescue Robots, Denver, CO, Nov., 2009.
- R.M. Voyles and R. Godzdanker, " Side-Slipping Locomotion of a Miniature, Reconfigurable Limb/Tread Hybrid Robot," in IEEE Workshop on Safety, Security and Rescue Robots, Sendai, Japan, Oct., 2008, pp. 58-64.
- R. Godzdanker and R.M. Voyles, " Steering Control of an Active Tether Through Mass Matrix Control," in IEEE Workshop on Safety, Security and Rescue Robots, Sendai, Japan, Oct., 2008, pp. 128-133.
- R. Voyles and J. Bae, " The Gestural Joystick and the Efficacy of the Path Tortuosity Metric for Human/Robot Interaction," in PerMIS, Gaitherburg, MD, Aug., 2008.
- R. Godzdanker and R. Voyles, "Non-Isomorphic Tread Design for a Side-Slipping Tread/Limb Hybrid Robot," in SICE, Tokyo, Japan, Aug., 2008, pp. 1008-1012.
- R. Voyles and J. Bae, "The Gestural Joystick and the Efficacy of Path Tortuosity in Rubbled Environments," in SICE, Tokyo, Japan, Aug., 2008, pp. 992-996.
- A.C. Larson, G.K. Demir, and R.M. Voyles, "Terrain Classification Using Weakly-Structured Vehicle/Terrain Interaction ," in Autonomous Robots, v. 19, pp. 41-52, 2005.
- A. Larson and R. Voyles, "TerminatorBot: A Novel Robot with Dual-Use Mechanism for Locomotion and Manipulation," in IEEE/ASME Transactions on Mechatronics, v. 10, n. 1, pp. 17-25, 2005.
- R.M. Voyles, A.C. Larson, M. Lapoint and J. Bae, " Core-Bored Search-and-Rescue Applications for an Agile Limbed Robot," in Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, v. 1, pp. 58-63.
- R.M. Voyles, A.C. Larson, K.B. Yesin, B. Nelson, "Using Orthogonal Visual Servoing Errors for Classifying Terrain," in Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, v. 1, pp. 772 - 777.
- R.M. Voyles, "A Mesoscale Mechanism for Adaptive Mobile Manipulation," in Proceedings of the ASME Dynamic Systems and Control Division, ASME Annual Meeting, v. 2, pp. 957-964.
- R.M. Voyles, "TerminatorBot: A Robot with Dual-Use Arms for Manipulation and Locomotion," in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 1, pp. 61-66.
- K. Yesin, B. Nelson, N. Papanikolopoulos, R. Voyles and D. Krantz, "Active Video System for a Miniature Reconnaissance Robot" in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 4, pp. 3920-3925.
Robotics Sources
Distributed Robotics Source ListCopyright: © 2007,2010,2014,2016,2018-2019 by Richard M. Voyles
rvoyles [at] purdue [dot] edu